この記事では、ArduinoマイコンとRCサーボモーターの角度制御する方法をソースコード付きで解説します。
RCサーボのPWM制御
RCサーボを制御するにはPWM波と呼ばれる信号を送る必要があります。この方式をPWM制御といいます。
今回は、Arduinoを用いてRCサーボのPWM制御をおこないました。
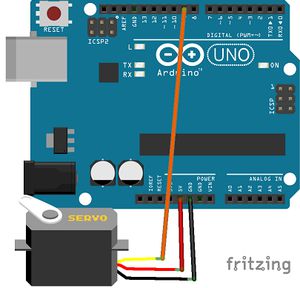
回路構成(配線図)
Arduinoと電子部品の構成・配線は下記の通りです。
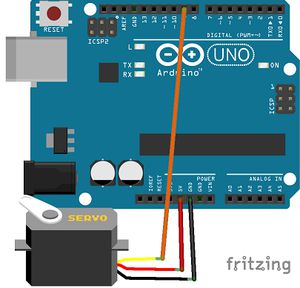
【電子部品】
・Arduino UNO (1個)
・RCサーボ S03R 2BBMG (1個)
・ジャンプワイヤー (数本)
処理手順
実装するプログラムの処理の流れは下記の通りです。
①Servoオブジェクトを宣言する(servo1)
②PWM制御信号を送る出力ピンを設定する(9番ピン)
③初期の回転角を0度に設定する(deg)
④0から180度回転までRCサーボを回転させる(20msに1度ずつ回転)
⑤180から0度回転までRCサーボを回転させる(20msに1度ずつ回転)
⑥3~5の処理を繰り返す
ソースコード
サンプルプログラムのソースコードは下記の通りです。

【Arduino】シリアル通信でサーボモータの回転制御
この記事では、Arduinoマイコンとシリアル通信でRCサーボモータの角度制御をする方法をソースコード付きで解説します。
algorithm.joho.info
2017.01.11
【Arduino入門】サンプル集
このページでは、Arduinoで電子工作する方法やサンプルプログラム(ソースコード)を入門者向けに解説しています。
algorithm.joho.info
2017.01.11

コメント