
M5Stick CとRoverCでオムニホイール型の四輪ロボットを制御する方法について紹介します。
M5StickC×RoverCでメカナムホイールロボットを作成
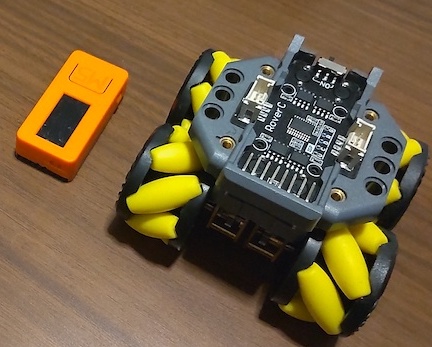
RoverCはM5StickCと組み合わせて制御できるメカナムホイールロボット(全方向へ移動可能な四輪駆動ロボット。通称、「全方向移動ロボット」)です。
メカナムホイールロボットは、「ホイールの車軸に対して、45度の角度で樽形の小型ローラーが配置された特殊なホイール」で走行するため、全方向へ移動可能となる仕組みです。
具体的には、以下写真(右側)のような感じでRoverC本体上部にM5StickCを差し込んでやります。
【M5StickC装着前】
ジョイパッド(左)、RoverC(メカナムホイールロボット)
【M5StickC装着後】
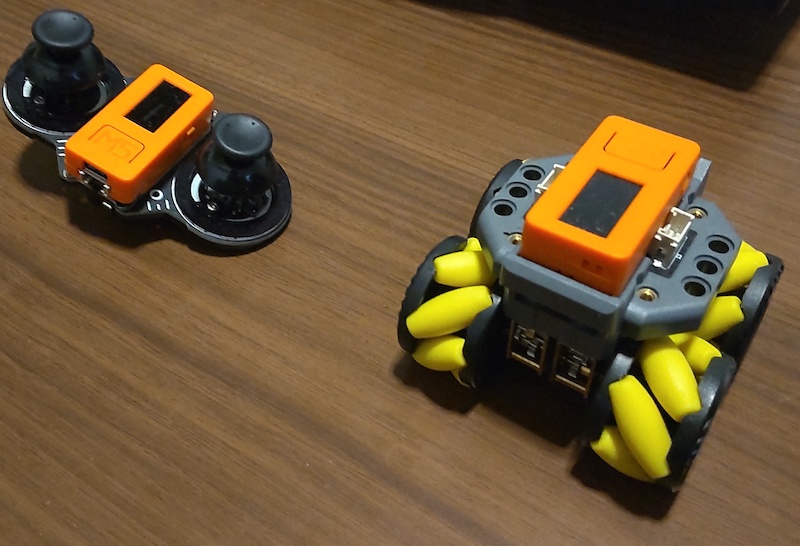
M5StickCとRoverCは両方ともバッテリーが内蔵されているため、これだけで動作可能なメカナムホイールロボットが完成です。
写真(左側)にもジョイパッド + M5StickCがありますが、これでメカナムホイールロボットを制御できます。
これが無くても、メカナムホイールロボット単体(M5StickC+RoverC)で自律移動させることも可能ですし、Wi-Fiに接続して、無線通信でパソコンやスマホなどからメカナムホイールロボットを制御させることも可能です。
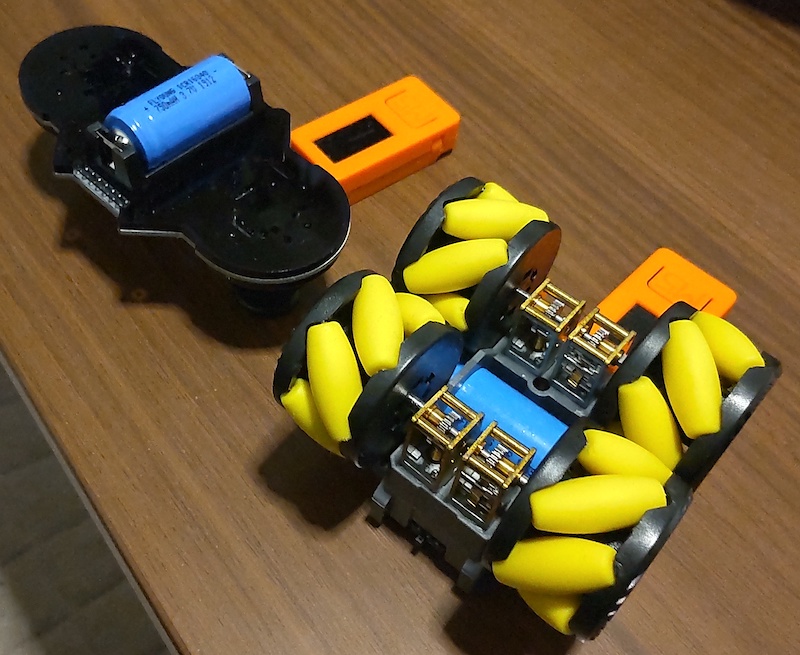
【裏面】
ジョイパッド(左)、RoverC(メカナムホイールロボット)の裏側をみると内蔵バッテリーがむき出しで見えます。
RoverCのホイールをみると、「ホイールの車軸に対して、45度の角度で樽形の小型ローラーが配置」されていることがわかります。これにより、全方向へ移動可能となります。
ただし、 一般的にメカナムホイールは、不整地(凹凸状の床面)での走行が難しいと言われています。
サンプルコード
RoverC(メカナムホイールロボット)単体で前後左右に移動するプログラムです。
【sample01/sample01.ino】
">
【sample01/RoverC.h】
">
【sample01/RoverC.cpp】
">
プロジェクト一式はGithub(https://github.com/nishizumi-lab/sample/tree/master/m5stick-c/01_roverc/sample01)で公開しています。


コメント