Python版OpenCVでLucas-Kanade法を実装し、物体追跡(オプティカルフローを計算)する方法をソースコード付きで解説します。
## 【OpenCV】オプティカルフローで物体追跡
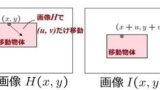
オプティカルフローとは、デジタル画像中の物体の動きを「ベクトル」で表したものです。
主に移動物体の検出や、その動作の解析などによく用いられています。
実行例
しかしオプティカルフロー(=物体の移動ベクトル)を一意的に求めることは困難です。
一般的には推定によって動き(ベクトル)を求めます。
オプティカルフローを推定する手法は代表的なモノに「LucasKanade法」や「Horn-Schunk法」があります。
今回は、Shi-Tomasi法で求めた特徴点を「LucasKanade法」で追跡してみます。
【オプティカルフローとは】推定の原理・特徴・計算式
オプティカルフローとは?移動量の推定方法、原理、計算式についてまとめました。
algorithm.joho.info
2020.02.25
動画解説
## ソースコード(Python3+OpenCV3)
サンプルプログラムのソースコードです。

【Python版OpenCV入門】画像処理の基礎〜応用例までサンプルコード付きで徹底解説
Python版OpenCVで画像処理プログラミングを行う方法を入門者向けにソースコード付きで解説するページです。
algorithm.joho.info
2020.02.20


コメント