C言語を用いて、2リンクマニピュレータの順運動学を求めるプログラムを紹介します。
## 順運動学の計算式 (2リンクマニピュレータ)
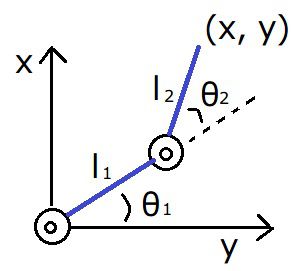
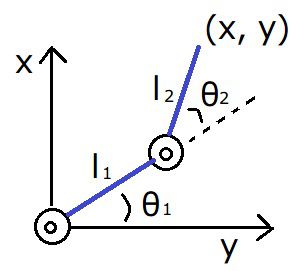
2リンクマニピュレータとは、2自由度のロボットアームのことです。
順運動学は、関節角度から手先位置を求めることです。
2リンクマニピュレータの順運動学の計算式は次のようになります。
(1) 
ここで、 は手先位置、
は手先位置、  は第1関節と第2関節のリンク角度、
は第1関節と第2関節のリンク角度、 は第1リンクと第2リンクの長さです。
は第1リンクと第2リンクの長さです。
【参考文献】
・2リンクマニピュレータの順運動学
今回はこれをC言語で計算してみました。
## ソースコード
プログラムのソースコードは下記の通りです。
## 実行結果
プログラムの実行結果は下記の通りです。
(x, y)=(1.208046, 1.439693)
リンク1の長さ0.5、リンク2の長さ0.6、関節1の角度30[deg]、関節2の角度40[deg]としたときの
手先位置を求めています。
【関連記事】
・C言語でロボット制御プログラミング
・C言語入門 (サンプルプログラム集)

コメント