オプティカルフローとは?移動量の推定方法、原理、計算式についてまとめました。
オプティカルフローとは
オプティカルフローとは、デジタル画像中の物体の動きを「ベクトル」で表したものです。
主に移動物体の検出や、その動作の解析などによく用いられています。
しかしオプティカルフロー(=物体の移動ベクトル)を一意的に求めることは困難です。
一般的には推定によって動き(ベクトル)を求めます。
オプティカルフローを推定する手法は代表的なモノに「LucasKanade法」や「Horn-Schunk法」があります。
この記事では、まずオプティカルフローの基本的な考え方について紹介します。
【仮定】オプティカルフローの拘束方程式
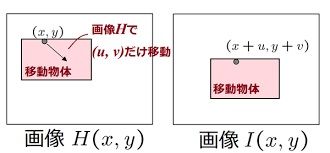
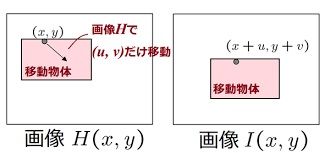
上図のような連続する2枚の画像 を撮影したとします。
を撮影したとします。
このとき、画像中にある移動物体の動きを調べたいとすると、画像 上の移動物体の画素が、画像I上でどこまで移動したかを求める必要があります。
上の移動物体の画素が、画像I上でどこまで移動したかを求める必要があります。
ここで, 画像に対して以下の仮定を置きます。
仮定
②画像は滑らか(微分可能)
③画素の移動量は小さい(1画素以下)
画像 における座標
における座標 の画素値を
の画素値を 、画像における座標
、画像における座標 の画素値を
の画素値を とします。
とします。
このとき、仮定①より「画素が移動しても画素値は変わらない」ことから以下の等式が成立します。
(1) 
仮定②③よりを一次項までテイラー展開すると以下の式が得られます。
(2) 
(2)式を(1)式に代入すると以下の式が得られます。
拘束方程式
(3) 
(3)式は「オプティカルフローの拘束方程式」と呼ばれる重要な式です。
仮定①が成り立つ、画像中のすべての画素がこの拘束式を満たします。
【推定問題】Aperture problem
オプティカルフローの拘束方程式は以下のように表せます。
(4) ![\begin{eqnarray*} \nabla I・[u\hspace{7pt}v]^T=&-\Delta I \end{eqnarray*}](https://algorithm.joho.info/wp-content/ql-cache/quicklatex.com-1ae65d9ee043b5a6d180f6c4ef129671_l3.png "Rendered by QuickLaTeX.com")
(4)式は|エッジの勾配|と|エッジに対する移動ベクトルの垂直運動成分|の内積が画像の差分に等しいことを表しています。
この数式の意味を整理すると以下のようになります。
②エッジと平行な移動ベクトルは求めることができない
これを窓問題(Aperture problem)といいます。
オプティカルフローの拘束方程式は1画素辺り1つだけ得られます。
しかし、拘束方程式1つには未知数が2つ(画素の移動ベクトル )あります。
)あります。
よって、最初に述べたとおり、連立方程式を解いてもuとvの解が複数になるため、一意に求めることが出来ません。
なので、複数出てくる解の候補達から最も正解に近い解 を推定してやる必要があります。
を推定してやる必要があります。
これがオプティカルフローの推定問題です。
推定方法については古くからたくさん研究されており、その中でも有名なのが「LucasKanade法」や「Horn-Schunk法」です。
「LucasKanade法」については以下ページで解説しています。
関連ページ

コメント