2リンクマニピュレータの運動学計算式とその導出方法について紹介します。
順運動学の計算式 (2リンクマニピュレータ)
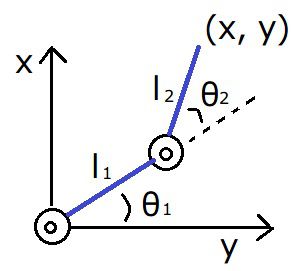
2リンクマニピュレータとは、2自由度のロボットアームのことです。
順運動学は、関節角度から手先位置を求めることです。
2リンクマニピュレータの順運動学の計算式は次のようになります。
(1) 
ここで、 は手先位置、
は手先位置、  は第1関節と第2関節のリンク角度、
は第1関節と第2関節のリンク角度、 は第1リンクと第2リンクの長さです。
は第1リンクと第2リンクの長さです。
計算式の導出方法
マニピュレータの根元を原点(0 , 0)とします。
このとき、1つ目のリンク先の座標 は次のようになります。
は次のようになります。
(2) 
2つ目のリンク先の座標、つまり手先位置(x, y)は
(3) 
となります。は先程求めているので代入してやると
(4)
となります。順運動学の計算式は3リンク、4リンクも三角関数の定理を使うだけで求まります。
関連ページ

ロボット工学入門
ロボット工学の基本的なアルゴリズムや公式について入門者向けに解説します。
algorithm.joho.info
2024.07.06
コメント